
Extending Cooperative Cuisine Mujoco 3D Physics Simulation for Robotic Training
Suitable for:
Bachelor or Master projectDescription:
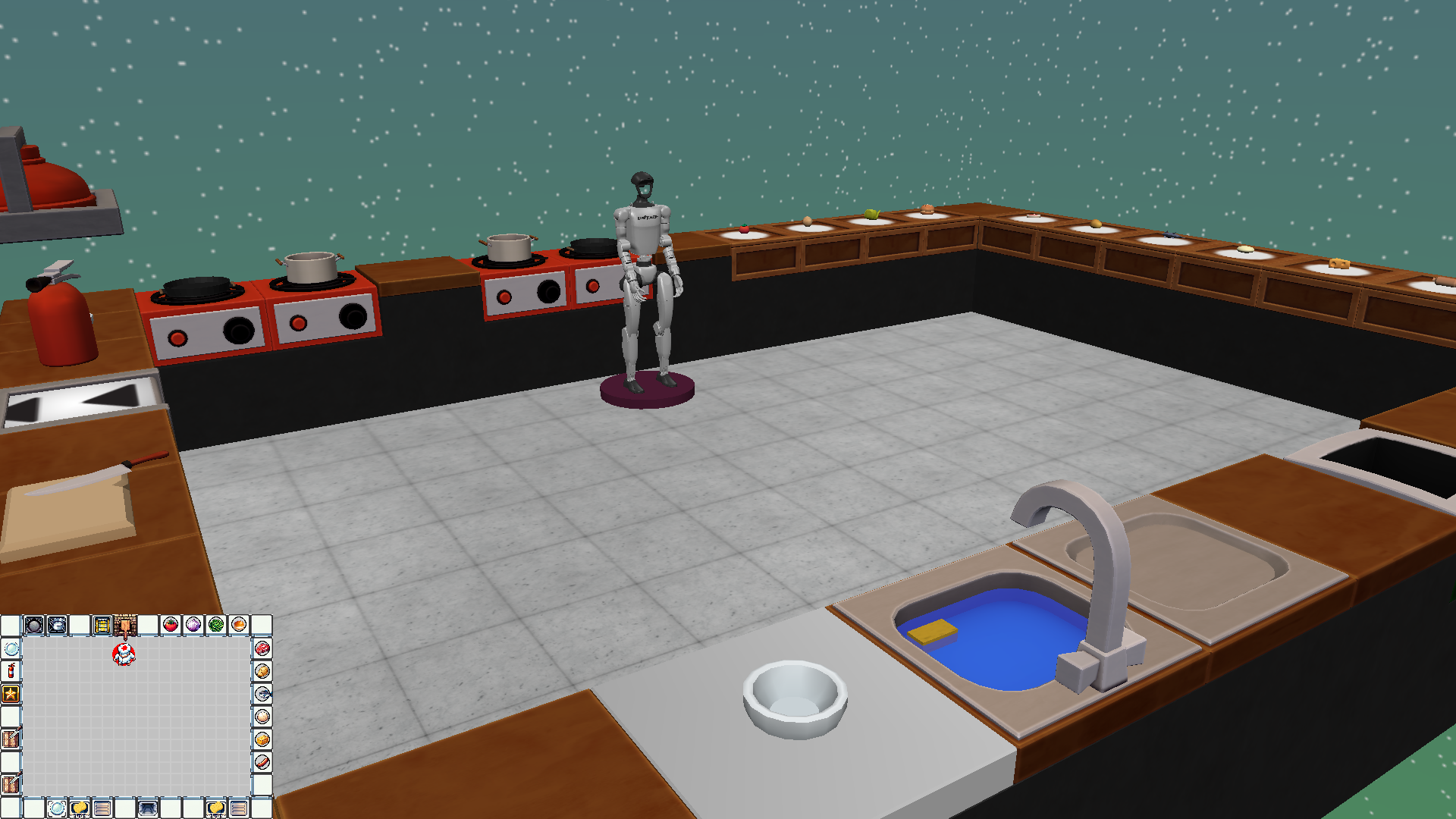
This thesis aims to enhance the existing Mujoco-based Cooperative Cuisine simulation to better support robotic training. The focus is on refining the physical modeling of objects and agent actions within the kitchen environment, making them more suitable for training and evaluating robotic agents. Implementation will be carried out in Python using the Mujoco API. The project includes testing and validating the improvements in cooperative scenarios.